Description
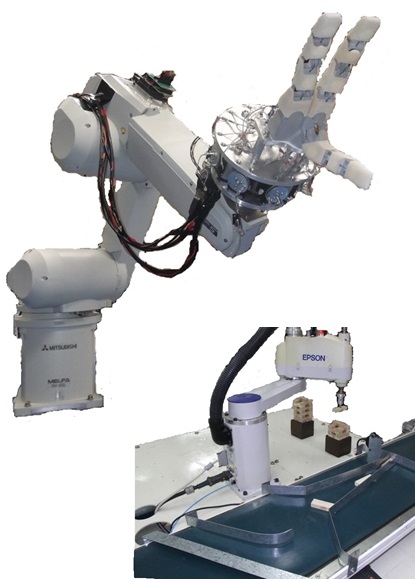
Research in robotics,
mechatronics and
automation has been a
very active area in our
Faculty since the late
1990s, and has been
growing steadily ever
since. Over the years,
this research group has
developed competences in
the following areas:
analysis of human and
artificial dexterous
hands; the study and
quantification of manual
dexterity; the design
and development of
dexterous artificial
hands, and of glove
input devices for the
remote manipulation of
these hands; the
analysis and improvement
of the actuation
approach and of the
simplicity, dexterity
and usability (SDU) of
compact multi
degree-of-freedom
(CMDOF) mechatronic
devices; the study of
underactuated hands
(UAHs); the development
of robot-inclusive
spaces and associated
mobile domestic robots;
the development of
innovative sensors and
actuators; and the study
and development of
reconfigurable
automation systems. This
research activity has
introduced to the
international literature
a number of new terms,
acronyms and approaches
such as dexterous
actuation assessment
protocol (DAAP);
actuation dexterity;
minimal anthropomorphic
robot (MAR) hands;
dynamic simulation-based
optimization of
successful grasp range
(SGR) in UAHs; CMDOF;
and the SDU evaluation
of mechatronic
devices.
Funded Projects and
Publications
14 June 2016
http://www.um.edu.mt/eng/mec/research/sub_areas/biomechanics






 You are not signed in
You are not signed in